Some animals can survive and escape predators through camouflage (e.g., chameleons) or the sacrifice of body parts (e.g., geckos). Such adaptive characteristics can inspire the design and development of biomimetic soft actuators (soft devices that produce motion). However, it remains challenging to create a soft actuator system that combines programmable deformation, discoloration, and self-healing attributes, which mimic living organisms.
Quan Li, Southeast University, Nanjing China, and Kent State University, OH, USA, Hong Yang, Southeast University, and colleagues have fabricated a multifunctional biomimetic soft actuator. The team incorporated a mechanochromic tetraarylsuccinonitrile group into a polysiloxane-based liquid crystal elastomer (LCE) via a thiol-ene photoaddition. Specifically, they used poly(3-mercaptopropylmethylsiloxane) (PMMS) as a polymeric backbone, 4-methoxyphenyl-4-(1-buteneoxy) benzoate (MBB) as a mesogenic monomer, 2,2-dimethoxy phenylacetophenone (DMPA) as a photoinitiator, and 2,3-bis-(4-dec-9-enyloxy-phenyl)-2,3-bis-(4-methoxy-phenyl)-succinonitrile (TASN-diene) as a crosslinker.

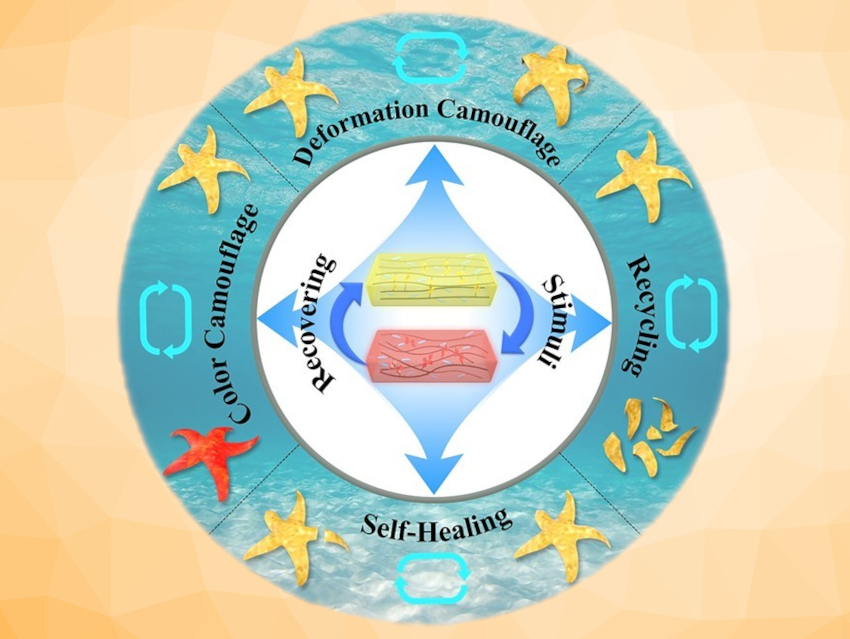
The resulting material is capable of reversible thermo- and mechano-responsive shape- and color changes, along with self-healing and recycling properties. The shape change is due to the material stretching and expanding under external stimuli. The color change is due to the formation of pink radical species by breaking the central C–C bond in the crosslinker in response to a stimulus. This reversible breaking of a covalent bond also provides self-healing properties.
The dynamic distortion, crawling, and self-healing properties of the actuator mimic the behaviors of a starfish. This nature-inspired, adaptive material could have applications, e.g., in soft robotics, sensing, or artificial camouflage.
- Thermo‐ and Mechanochromic Camouflage and Self‐Healing in Biomimetic Soft Actuators Based on Liquid Crystal Elastomers,
Zhongcheng Liu, Hari Bisoyi, Yinliang Huang, Meng Wang, Hong Yang, Quan Li,
Angew. Chem. Int. Ed. 2021.
https://doi.org/10.1002/anie.202115755
![]()

![Synthesis of [c2]Daisy Chains via Mechanochemistry](https://www.chemistryviews.org/wp-content/uploads/2025/04/202504_RotaxanesWithSolidStateMechanochemistry-125x94.png)
