Ferrocene could be useful in the development of molecular machines, in particular, “wheel-and-axle”-types of machines. The motion of such molecular machines can be controlled by external stimuli, e.g., by electrical signals. For ferrocene, a change in the relative conformation of its cyclopentadienyl rings, i.e., an internal rotation, can be caused by a redox reaction that changes the state of the iron center between Fe2+ and Fe3+. However, the sandwich complex has a tendency to decompose when deposited onto noble metal substrates, which makes it challenging to use in this context.
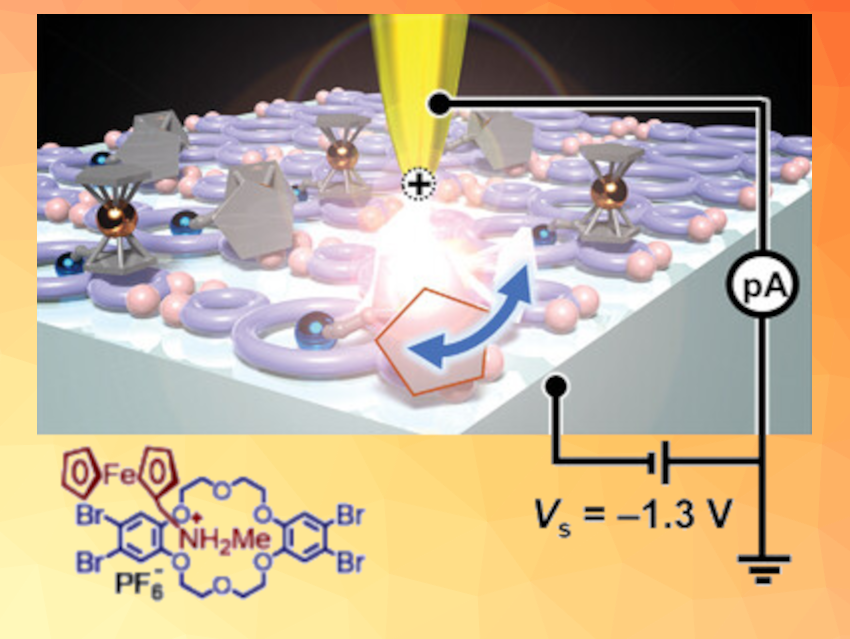
Masaki Horie, National Tsing Hua University, Hsinchu, Taiwan, Toyo Kazu Yamada, Chiba University, Japan, and colleagues have stabilized ferrocene on a Cu(111) surface by pre-coating the surface with a monolayer of a tetrabrominated crown ether and by linking the ferrocene to an ammonium group that acts as an anchor. The team used 4,4′,5,5′-tetrabromodibenzo[18]crown-6 ether for the monolayer coating and [ferrocenylmethyl(methyl)ammonium]+(PF6)− as the ammonium salt.
Using scanning tunneling microscopy (STM), the researchers found that the resulting ferrocene derivative performs a reversible lateral sliding motion on the surface (pictured) upon the application of an electrical voltage, i.e., it acts as a controllable molecular machine. This motion is caused by a change in the oxidation state of Fe, leading to twisting and sliding. Upon removing the applied voltage, the molecule returns to its original position, demonstrating that the motion is reversible and can be controlled using electrical signals. Overall, the work can provide useful information for the development of new nanomolecular devices using on-surface, bottom-up processes.
- Reversible Sliding Motion by Hole‐Injection in Ammonium‐Linked Ferrocene, Electronically Decoupled from Noble Metal Substrate by Crown‐Ether Template Layer,
Fumi Nishino, Peter Krüger, Chi‐Hsien Wang, Ryohei Nemoto, Yu‐Hsin Chang, Takuya Hosokai, Yuri Hasegawa, Keisuke Fukutani, Satoshi Kera, Masaki Horie, Toyo Kazu Yamada,
Small 2024.
https://doi.org/10.1002/smll.202408217
![]()