Motion can be controlled at the nanoscale in two ways: either by designing self-assembled nanodevices that mimic macroscopic objects, e.g., like space rockets, or by building devices that imitate biological systems with controlled motility. Such systems can move autonomously in the presence of fuel and can adapt to changes in their environment.
Yingfeng Tu, Southern Medical University, Guangzhou, China, Daniela A. Wilson, Radboud University, Nijmegen, The Netherlands, and colleagues have designed nanomotors whose motion can be controlled by host-guest interactions that open and close a “valve” on the motors. The devices were made by the self-assembly of amphiphilic polymers into small bowl-shaped vesicles with a narrow opening (pictured in blue). The vesicles contain an active platinum nanoparticle catalyst (pictured in grey). This catalyst promotes the decomposition of hydrogen peroxide to water and gaseous oxygen, which propels the nanomotors forward.
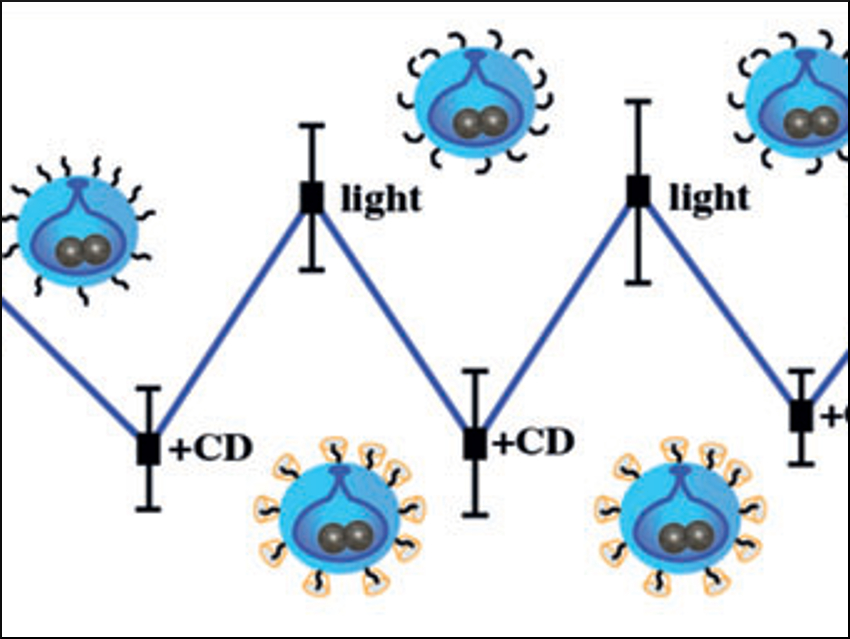
In order to regulate the access of the hydrogen peroxide fuel to this catalyst, trans-azobenzene derivatives were attached to the vesicle. β‐Cyclodextrin (β‐CD, pictured in yellow) can then form a complex with these azobenzenes and block the vesicle’s opening. The azobenzenes change their conformation to the cis-form under blue-light irradiation. The β‐CDs cannot form complexes with this cis‐isomer and is detached from the vesicle. Hydrogen peroxide can then reach the catalyst and the nanomotor’s movement speed increases.
In this way, a stimuli-responsive valve was implemented that can be used to control the motion of these polymeric vesicles. This light-responsive valve approach for motion control can endow soft self-assembled particles with desirable properties that might have applications in drug delivery and nanomedicine.
- Motion Control of Polymeric Nanomotors Based on Host-Guest Interactions,
Yingfeng Tu, Fei Peng, Josje M. Heuvelmans, Shuwen Liu, Roeland Nolte, Daniela Apreutesei Wilson,
Angew. Chem. Int. Ed. 2019.
https://doi.org/10.1002/anie.201900917